Numerical Analysis: Position Solutions to the Planar Stewart Platform (A Forward Kinematics Problem)
Abstract
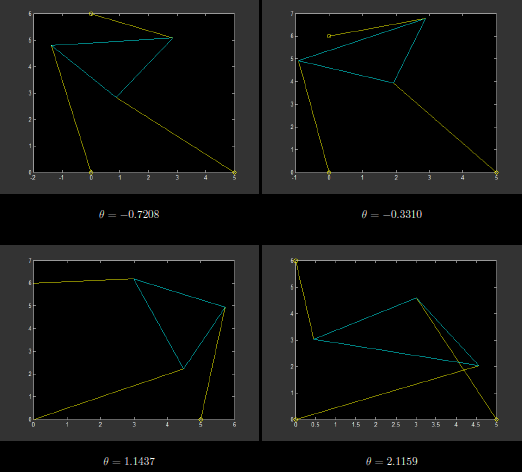
This project is an applied analysis of position solutions to the Planar Generalized Stewart Platform (GSP) and it's direct kinematics in MATLab. The GSP consists of a rigid-body platform suspended by three struts. The struts are able to move independently, offering 3-dimensional movement of the platform. This is useful in both ground-vehicle and flight training.
As this paper demonstrates, multiple forward solutions are available per strut (due to the 3-dimensional nature of the GSP), which can be computed with relative ease and conciseness.
(Code within document)
Author(s)
Wyatt "Miller" Miller
Similar Projects
All Projects









